1. Fully digitized speed and position control functions, and provide position, speed and torque control functions;
2. Flexible and variable tracking control mode to provide high sensitivity tracking effect;
3. Programmable digital input and output;
4, can monitor motor short circuit, voltage, temperature, encoder, position tracking and current is too high;
5. Parameter setting can be made through RS232, RS485, Profibus, CAN communication port;
Therefore, our servo drive is fully capable of this job. The following is a general introduction to this system:
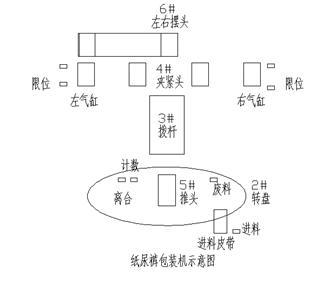
First, the process requires the diaper production line to deliver the produced diapers at a certain speed (speed from 1 piece / minute ~ 360 pieces / minute). The diaper packaging machine starts from receiving the diaper, and puts the diaper into a bag in packs of the required amount per pack. First, there is a switch at the turntable. After a diaper comes, the blades of the turntable are placed once, and the diapers keep coming in. There are two switches on the other side of the turntable, one for detecting the blades and one for detecting the lack of material. The lever sends the diaper out to the chuck, the chuck will clamp a number of diapers, the lever will continue to push the diaper forward to the left and right, then the cylinder will put a pack of urine The pants are pushed into the bag.
This article refers to the address: http://
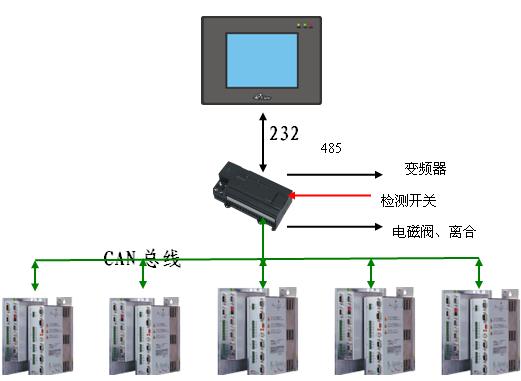
Second, the program design turntable, pusher, lever, chuck, left and right pendulum all need servo control. Cylinder, clutch, and gas valve require switching control. There are also some detection switches that need to be input to the controller. We analyzed this set of control systems and thought that the KincoK4 PLC with CAN bus controls the Kinco servo through the CAN bus. eView screen and K4 set and display parameters through RS232 and screen communication, 4 control the inverter through RS485, such a control scheme should be said to be the most reliable, simple and economical control scheme.
Third, one of the key points of programming implementation control system is how to coordinate with the main system. The overall running speed of the diaper packaging machine, which is automatically adjusted to the speed of the diaper production. The speed of the diaper production line is adjustable from 1 piece/minute to 360 pieces/minute. The number of each package is different, and the overall speed of the packaging machine is also different. The number of each package is 6 packs ~ 20 packs can be set. These variable quantities are too large and the combined numbers are very large. We carefully analyze the process, divided into four segments, 1 / min ~ 90 / min, 91 / min ~ 180 / min, 181 / min ~ 270 / min, 271 / min ~ 360 / min; According to the requirements of the process, we have chosen the most suitable configuration and programming method.
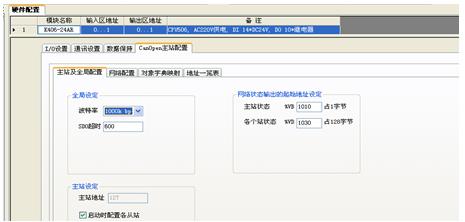
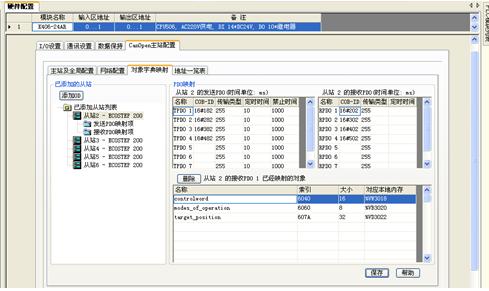
a) Select K406-24AR for the hardware configuration and CPU module. Focus on CANOPEN master station configuration, CANOPEN master station configuration mainly includes: master station and global configuration, network configuration, object dictionary mapping. The detailed configuration is as follows:
Master station and global configuration:
Main configuration: baud rate, SDO timeout, start address setting of network status output, and configuration of each slave at startup.
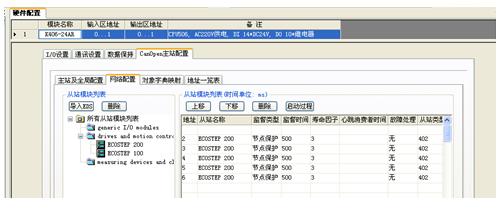
Network Configuration:
Main configuration: station number, supervision type, supervision time, life factor, fault handling, and slave type of each servo controller.
Object dictionary mapping:
Main configuration: Receive PDO and Send PDO for each station.
1. Receive PDO: control word, control mode, target position, maximum speed, target speed, homing mode.
2. Send PDO: status word, actual location.
b) Programming includes: PLC program, touch screen program, servo driver program, only a brief introduction here. When the hardware is configured, control the servo, just fill in the value in the corresponding register of the PLC.
PLC mainly wrote the following subroutines: power-on initialization, find the origin, manual, automatic, fault alarm, fault reset and so on.
ï¬ Power-on is delayed, and each device finds the origin.
ï¬ Manual mode: Operate the actions of each device on the screen.
ï¬ Automatic mode: Select the automatic mode. After starting, it will automatically receive the diaper and automatically pack the package.
ï¬ Since the turntable has to follow the speed of the production line, the electronic gear ratio of the turntable servo should be set. Also use the SDO method.
ï¬ PLC communication RS485 communicates with the inverter to change the speed of the inverter.
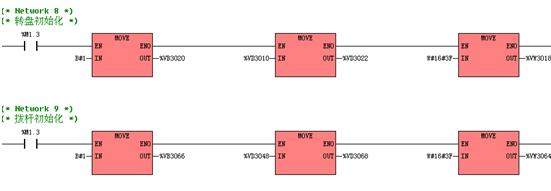
The following is a program in which you can see that the PLC is controlling the servo by means of PDO, as shown below:
Fourth, after the completion of the debugging of the diaper packaging machine, it was well received by users. When the diaper production equipment is completed, the complete set of equipment is adjusted, and the effect is very good. The equipment has been sent to foreign customers. The diaper packaging machine has become a new economic growth point for the plant. Using KincoK4 to control Kinco intelligent servo via CAN bus is a good solution for multi-axis system. It can simplify system programming, reduce the programming of engineers, and reduce the number of pulse direction modules, saving customers cost. .
Female Header,Female Header Pitch 2.54Mm,Smt Female Header,In-Line Patch Female Connector
Shenzhen Jinyicheng Electronci Technology Co.,Ltd. , https://www.jycconnectors.com