In a conference room at Analog Devices, Howard Wisniowski took a demo board slightly larger than the commemorative stamp with one hand and stayed in the air about a meter or so from the table. This demo board is equipped with ADI's motion sensors and associated circuitry. Wisniowski released the hand holding the demo board and dropped the demo board to the other hand.
As soon as the demo board began to fall freely, the motion sensor sensed the change in acceleration. Before the demo board falls into Wisniowski's other hand, the red LED on the board begins to flash, while the micro-inverter emits a SOS signal in Morse code format. This responsiveness to redirection to the horizontal plane is exactly what consumers expect from notebook hard disk head assemblies or automotive air bag sensors.
The economies of scale, high sensitivity, and small size that are suitable for MEMS process technology can create many new applications, and these are just two of them.
How MEMS accelerometers and gyroscopes workThe core of MEMS accelerometers is partly in electronic circuits and partly in mechanical structures. Manufactured and packaged accelerometers can be used to measure acceleration in a single plane or in two/three orthogonal planes. Conceptually, the acceleration sensing portion typically includes a "moving block" at one end of the cantilever beam.
Deflection measurements of a plurality of motion blocks and beam systems in an accelerated state are typically accomplished by sensing a change in capacitance between a set of fixed beams and a set of deflection beams, somewhat similar to macroscopic variable capacitance. Since many capacitive sensors have a capacitive characteristic with relative displacement nonlinearity, the electrons in the sensor are used to convert the signal into a linear output. In addition to the capacitor, a piezoelectric type sensing element can also be used.
Some of the important characteristic parameters identified in the accelerometer data sheet include bandwidth and resonant frequency, noise floor, cross-axis sensitivity, drift, linearity, dynamic range, shock resistance, and power consumption. In general, the resonant frequency is several times higher than the upper bandwidth limit. Bandwidth and sensitivity are usually inversely related.
In addition to the noise sources commonly found in electronic devices, thermal noise generated by the Brownian effect on moving blocks is also a significant source of noise due to the very small MEMS sensor.
Linear accelerometers have a large market in the field of transportation, especially in the field of deceleration sensing applications related to airbags. MEMS angular accelerometers in disk also have a large market that can be used to compensate for angular shock and vibration. Unlike linear products, these devices are located at the center of gravity at the center of gravity of the support spring and are therefore very sensitive to angular acceleration.
Acceleration, vibration, shock, and tilt are related to linear rate motion. Rotation is an angular rate motion. This mode of motion differs from other modes in that the acceleration may not change as the rotation occurs. To understand how it works, please refer to the three-axis inertial sensor diagram.
The X and Y axes of this sensor are parallel to the Earth's surface and the Z axis is pointing to the center of the Earth. In this position, the measured value of the Z axis is 1 g, and the X and Y axes record 0 g. Rotate this sensor so that it only moves on the Z axis, the X and Y planes just rotate, so the measured data is still 0g, and the measured value of the Z axis is still 1g.
This is why MEMS gyroscopes sense this rotational motion. Because some end products must measure rotation in addition to other modes of motion, the gyroscope can be integrated into an inertial measurement unit (IMU) embedded with a multi-axis gyroscope and a multi-axis accelerometer.
Accelerometers measure displacement and vibration on a plane, while MEMS gyroscopes measure displacement caused by Coriolis forces. Although Coriolis force has nothing to do with the water flowing out of the bathtub sewer, it does work on objects smaller than the hurricane. It seems to have a moderate size in every science museum, but it is far from being miniature. The object was successfully demonstrated.
Suppose the reader remembers that Foucault has a relationship with the rotation of the Earth. Here is a brief explanation. Suppose you have a vibrating mass particle (pendulum ball) that moves at a resonant speed of v0 cos(0t), which is fixed at a body (earth) rotation speed of 0 in. The Coriolis effect will produce an acceleration that varies with time, with the same frequency as the drive acceleration, but at a right angle to the velocity vector of the mass particle. That is, the Coriolis acceleration is a vector product, ie a(t) = [ 2Oin &TImes; v0] cos(Ot).
Now let's expand our imagination and replace the huge Foucault with a vibrating tuning fork. You can get a similar result (Figure 1). The normal vibration mode of the tuning fork is in one plane, and the displacement caused by the Coriolis effect is in another plane orthogonal to it. By narrowing the tuning fork to the MEMS size, driving the tuning fork with an external signal, and using three separate tuning forks for each of the three axes, you can understand the basic concept of a three-axis MEMS accelerometer.
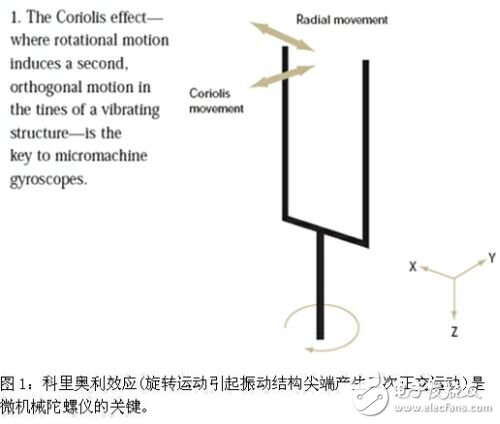
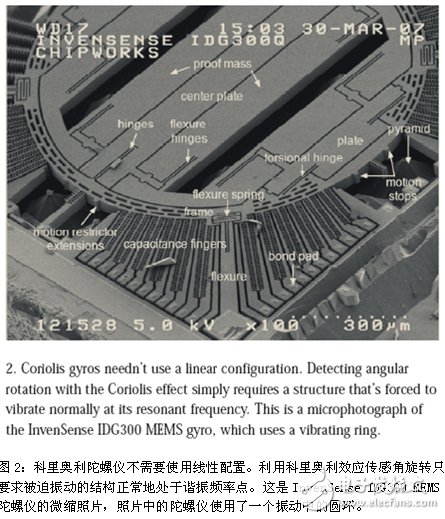
Of course, the "basic concepts" above ignore the challenges of actually manufacturing devices, cross-coupling vibrations from one axis to another, calibration, thermal issues, and the like. We don't need to make the vibrating element look like a piano tuning tool. Imagine what you can do with a ring structure that vibrates like a bell or a glass (Figure 2). There have been a large number of patents on MEMS structures so far, and there are many clever ways to make these devices using semiconductor process flows.
When it comes to accelerometers, people think of car airbag applications. But in fact, because both movement and positional changes are accompanied by acceleration, MEMS accelerometers are often used to detect events that are less intense than collisions with cars.
As long as the device is lifted or lowered, the resulting acceleration changes can be detected, then an interrupt is generated, and some functions in the device are turned on or off by the interrupt service, or some parts are kept working properly, and other parts are made. Enter the standby state. For example, a handheld device can use this function to turn off the backlight display, and then turn on the backlight display when it is picked up. Of course, the motion sensor preferably consumes much less power than the backlight.
More dramaticly, about a year ago, I wrote an article about the portable radio for the first respondent, when the person carrying the radio stopped moving for a while and the radio automatically signaled -- for example A firefighter was injured in a burning building (see "P25 Handhelds Incorporate High-Velocity Human Factors Design"). Or on the battlefield, you don't want the enemy to pick up the radio from a dead or injured comrade, and then use it to get tactical intelligence, then you can programmatically have the radio re-certified before allowing the user to use it.
Wisniowski also introduced a new type of defibrillator that can be used in public places. These devices can help a relatively inexperienced rescuer to provide cardiopulmonary resuscitation (CPR) when electronic heart stimulation fails. When this happens, Wisniowski said, “An inexperienced rescuer may not be able to compress the patient's chest in place to achieve effective CPR. This can be done with a chest pad embedded in an automatic external defibrillator (AED). The accelerometer in the measurement measures the moving distance of the pad, thus providing the rescuer with the correct amount of compression feedback."
In the energy harvesting article published in Electronic Design magazine, the most common application is to evaluate the state of mechanical systems (such as industrial pump motors, rail wheel axle bearings, and highway bridges) through vibration monitoring. The general staff interprets this as using the monitored vibrational energy to power the microcontroller and the mesh wireless node, but I rarely consider the source of the raw data.
However, this is a critical part of the system and requires the use of very small and wide bandwidth MEMS accelerometers to capture sufficiently accurate normal and abnormal vibration data. Finally, sufficient diagnostic information is needed to achieve an intelligent judgment of the timing of potential failures.
So far we have considered displacement and vibration. Shock pulse events are another source of acceleration, and their most widespread use may be notebook disks. Interestingly, in a disk application, it is not the impact itself that needs to be detected, because it is too late to do everything in the event of an impact.
As Wisniowski's "SOS" demo suggests, we can detect a change in g force that indicates the fall of the notebook before the impact itself occurs, a change that is a precursor to the damaging impact associated with striking the floor. Within a few milliseconds between the 0g condition and the notebook hitting the floor, the system is fully capable of hovering the disk head.
Apple's iPhone and Nintendo's Wii let us get used to accentuators and gyroscopes for gesture recognition, such as tapping, double-clicking, and shaking, to activate certain functions and adjust working modes. In addition to making the product cooler, there are other benefits to providing gesture input. In products such as underwater cameras, the buttonless design also has the advantage of reducing system cost and making the system more rugged. The tapping interface is also ideal for use in wearable and implantable medical devices.
Wii game control also brings tilt sensing. In addition to game control, tilt sensing can also play a role in industrial applications, such as operating the device with one hand and leaving the other hand to control the car or platform that travels on rough roads. Here you use a three-axis accelerometer to detect slow changes in tilt due to gravity and to explain twisting or tilting in one direction or the other.
Let's look at a more practical application than the Wii-like industrial equipment control. There are a lot of work involved in tilt sensing, such as adjusting the industrial scale and the pressure in the right direction.
Another complex product - the latest inertial measurement unit (IMU) integrates a multi-axis accelerometer, a multi-axis gyroscope and a multi-axis magnetometer. ADI's six-degree-of-freedom IMU provides high resolution in medical imaging and surgical instruments.
Early breakthrough productsIn mid-2007, ADI achieved a new breakthrough with the ADIS16355 IMU. This device combines three-axis angular rate sensing and three-axis acceleration sensing with 50 times higher sensing accuracy than other inertial sensors on the market. In addition, it has a pre-calibration feature that provides accurate data regardless of temperature, so product designers do not need to embed calibration value tables in the system code.
During the promotion phase of the ADIS16355, the full-temperature range calibration version was priced at $359 in 1,000-piece quantities and the room-temperature calibration version was $275. The ADIS16355 is a cube-shaped device with a side length of only one inch. It requires very little space to mount a flexible circuit with connectors on its pins and ends.
Target applications for the ADIS16355 are typically car cameras and antennas, commercial aircraft navigation units, robotics and prosthetics (prostheTIcs). Another important area is inertial backup navigation when GPS signals are lost. This feature is not only important in the aerospace industry, but is also very useful in commercial vehicle formations and in automatic harvesting equipment on large farms.
The ADIS16355 has 14-bit accuracy, and both output and control are done through a simple serial peripheral interface (SPI). Each gyroscope has a dynamic measurement range of ±300°/s, and each accelerometer has a measurement range of ±10g. Although the maximum dynamic range is ±300°/s, this IMU also offers a range of ±75°/s and ±150°/s.
The signal conditioning circuit of each sensor has an analog bandwidth of approximately 350 Hz. The ADIS16355 provides a Bartlett Window finite impulse response (FIR) filter with programmable step size, which provides additional noise rejection for all output data registers.
In addition to motion measurement with calibration, the ADIS16355 measures supply voltage and temperature and provides a 12-bit analog-to-digital converter (ADC) auxiliary channel. This output data is internally updateable regardless of the user read rate. The output data length can be 12 or 14 bits.
The 12-bit progressive approximation auxiliary ADC makes it possible to digitize other system-level analog signals. In addition, the 0 to 2.5V auxiliary output digital-to-analog converter (DAC) provides 12-bit level adjustment.
About six months before the ADIS16355 was launched, ADI introduced the ADIS16209 dual-axis MEMS inclinometer and accelerometer for industrial applications (see "TIny Dual-Axis MEMS Inclinometer Simplifies Industrial Measurements").
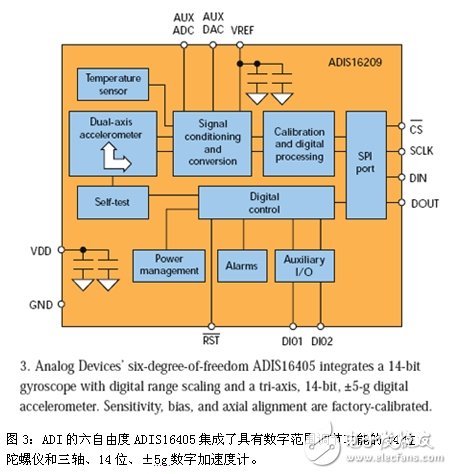
At the end of 2008, we saw the five-degree-of-freedom ADIS16300 and six-degree-of-freedom ADIS16405 IMU with 14 gyroscopes. Features include: digital range adjustable; ±75°/s, ±150°/s and ±300° /s setting; three-axis, 14-bit, ±5g digital accelerometer; 180ms response time (Figure 3). In addition, these products offer factory calibrated sensitivity, offset and axial alignment, digitally controlled offset calibration, and digitally controlled sample rates up to 819.2 samples/s (external clocks allow sample rates up to 1200 samples/s).
Also released at the same time is the ADIS16209 dual mode inclinometer. It provides ±90° dual-axis horizontal operation and ±180° single-axis vertical operation. The ADIS16209 operates at 3.3.V and communicates with the outside via the SPI bus.
At the ADIS16209 conference, ADI claims that the product is only 9.2x9.2x3.9mm, which is 100 times smaller than other products on the market, and the price is only one-tenth of the competitive product. As mentioned earlier, medical care is the main application of this product. Ultrasound, chest X-rays, and X-ray equipment require some precision and accuracy in scanner alignment. These devices are also used for hip and knee surgery.
This type of medical device is also one of the target applications for the six-degree-of-freedom ADIS16405 IMU, and its three-axis magnetometer sensor can be used for head sensing. According to Analog Devices, its cost is also 10 times lower than competing products.
Latest technology and product developmentsIn March of this year, ADI released the ADXL346 digital three-axis iMEMS intelligent motion sensor, which is a member of the small energy-absorbing intelligent motion sensor series for portable devices. The ADXL346 operates from a low voltage of 1.8V and is available in a 3x3x0.95mm package. In addition, it can measure dynamic acceleration (acceleration caused by motion or shock) and static acceleration (such as gravity, can be used as a tilt sensor).
To save power, the ADXL346 can buffer up to 32 sets of X, Y, and Z-axis sample data in first-in, first-out (FIFO) memory, leaving the main processor and other high-power peripherals in standby mode until needed. wake. Bandwidth is optional and ranges from 0.1 Hz to 1,600 Hz, so a good compromise between response speed and battery life can be achieved. Power consumption ranges from less than 150μA (1,600Hz bandwidth) to 25μA (bandwidth below 10Hz).
The ADXL346 measures dynamic acceleration over a user-selectable range of ±2/4/8/16g and includes built-in directional sensing that can be read by simple registers. Special sensing features with user-programmable thresholds include standstill, tap/double tap, and free fall sensing. The ADXL346 is priced at $3.04 in 1,000-piece quantities.
Earlier this year, ADI also introduced the ADXL345 three-axis accelerometer and claimed to be 80% more energy efficient than its competitor's three-axis sensor. The energy-saving design aspect includes a low single-cell operating voltage and the same FIFO mechanism as described above. This mechanism offloads response tasks to movement or acceleration changes from the host processor. In addition, the output data range can be adjusted from 0.1 Hz to 3.2 kHz, thus allowing portable system designers to accurately distribute power for specific system functions. The unit price of the ADXL345 in 1,000-piece quantities is $3.04.
Of course, ADI is not the only manufacturer of MEMS motion sensors. Freescale Semiconductor offers the MMA745xL three-axis digital output accelerometer for mobile devices. The device supports tilt scrolling, game control, gesture recognition and tapping mute in all directions, as well as theft protection, free fall sensing and GPS backup applications.
STMicroelectronics' LIS302DLH 16-bit three-axis accelerometer is ideal for motion sensing, direction recognition, free fall detection and vibration monitoring applications (Figure 4). According to the company, the LIS302DLH is only 0.75mm high and is the thinnest device on the market. The LIS302DLH outputs acceleration data up to ±8g over the Serial Peripheral Interface (SPI) bus.

To compensate for the lack of accelerometers ranging from games and telemetry to car navigation applications, and to improve camera panning, STMicroelectronics recently introduced a series of 15 single-axis and multi-axis MEMS gyroscopes. This series includes a wide full-scale range from 30dps to 6,000dps (degrees per second), including single-axis (deflection) and dual-axis (tilt and roll, tilt and yaw) devices.
Both configurations provide two independent outputs for each axis: one for unamplified output for general angular motion sensing and the other for 4-fold amplified output for high resolution measuring. The unit is priced at $2.50 in volume quantities.
For applications such as disk protection in handheld devices, STMicroelectronics has released the LIS352AX, a three-axis accelerometer with full analog output. The device operates from a low voltage range of 2.16V to 3.6V, is insensitive to changes in battery supply voltage, and is highly reliable for 0g offset and sensitivity over a wide temperature range. The built-in self-test feature allows the sensor to function properly after the board is assembled. The unit is priced at $1.30 in volume.
In March of this year, Kionix, which was independent from Cornell University, introduced the KXTF9 three-axis accelerometer, which has a new interface called “directional tapping/two tappingâ€. The KXTF9 can create up to 12 unique beat enable commands for use by end-use developers. The directional tap/tap interface senses a quick tap or two taps on either side of the six faces of the object.
Kionix CEO Greg Galvin said: “Single phone call surface can activate voice mail, or stop ringing, tap the left side of the phone to activate navigation, and tap the bottom of the phone twice to turn to Internet access. Other features include User-programmable output data rate (ODR), optional 8-bit or 12-bit resolution, user-selectable 2/4/8g gravitational acceleration range, and digital high-pass filter with user-selectable cutoff frequency. The KXTF9 operates from a voltage range of 1.8V to 3.6V.
Iwatch Screen Protector,Tempered Glass Package,40Mm Tempered Glass,44Mm Tempered Glass
Shenzhen TUOLI Electronic Technology Co., Ltd. , https://www.szhydrogelprotector.com