The iris contains abundant pigment cells. When external light is irradiated onto the eyes, the irises exhibit different colors because of the different absorption rates of light by different human pigment cells. From the perspective of recognition, the color information of the iris is not widely discriminating, and the subtle features such as spots, filaments, crowns, stripes, crypts and the like are the unique manifestation of the iris. These subtle features are consistent in color images and grayscale images, so grayscale images are generally used for iris recognition research.
The basic steps of iris recognition technology are as shown in Figure 3-1:
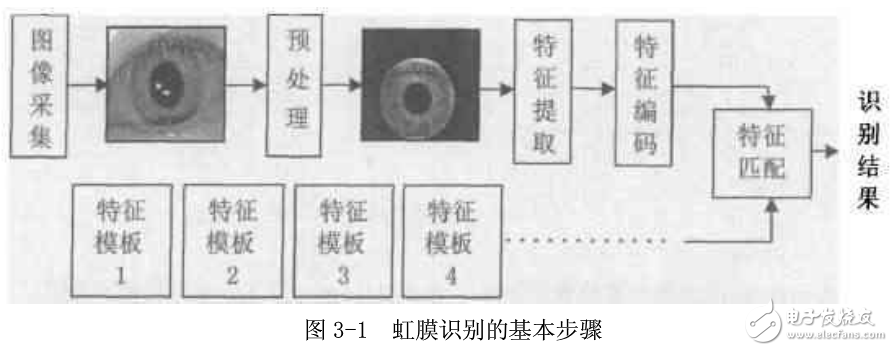
(1) Image acquisition for acquiring iris images;
(2) iris image preprocessing, iris inner and outer edge positioning, normalization and image enhancement;
(3) Feature extraction to obtain feature coding of iris texture;
(4) Feature matching, matching the extracted iris feature code with the feature template to distinguish different irises.
Iris recognition algorithm - two-dimensional Gabor waveletThis algorithm was proposed by Dr. Daugman in the literature in 1993. In the positioning of the iris, the strategy from coarse to fine is used to achieve the accuracy of a single pixel, and the center and radius of the iris and pupil are estimated. In general, the center of the pupil and the iris are different. The center of the pupil is slightly less important than the center of the iris, and its radius is 0.1 to 0.8 times the radius of the iris. Therefore, the three parameters that determine the circumference of the pupil must be estimated separately from the circumference of the iris. In the Daugman system, the designed two-dimensional Gabor filter filters the normalized iris texture. The formula is (4-1).


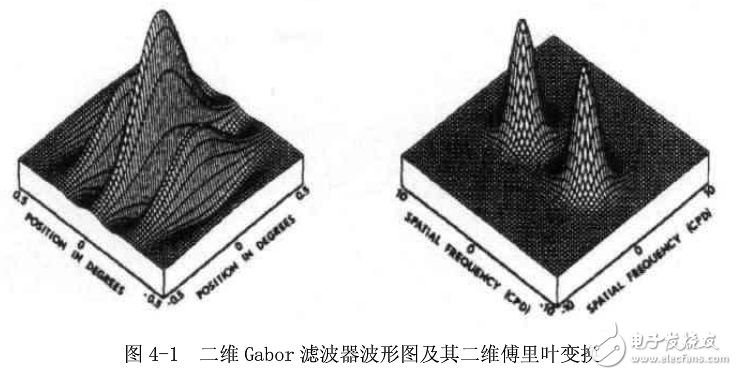
As shown in Figure 4-1
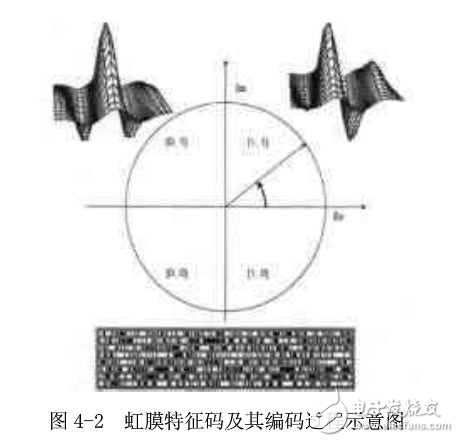
Daugman's method uses both the real and imaginary parts of the two-dimensional Gabor filter to describe the iris, and uses it to filter the iris image, and then quantizes the polarity of the filtered result into a 2-bit binary number: when the real part and the imaginary part The positive quantized value is 11; the real part is positive when the positive imaginary part is negative; the real part is negative imaginary part is positive when it is 01; when the real part and the imaginary part are negative, it is 00, thus obtaining iris characteristic code . Figure 4-2 is a schematic diagram of the iris signature and its encoding process.
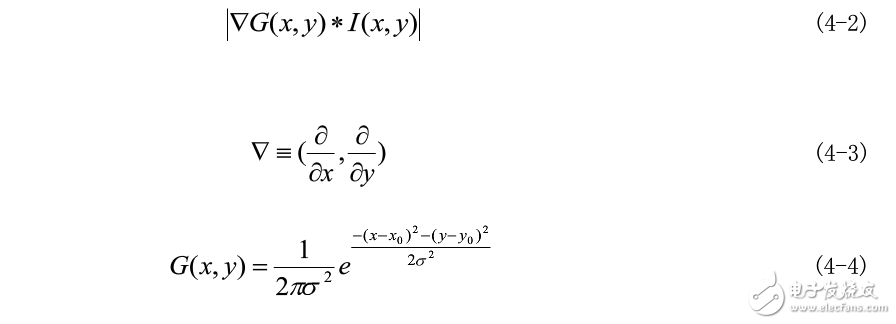
This algorithm was proposed in the literature by Dr. Wildes of the MIT Artificial Intelligence Laboratory in 1997. The algorithm is divided into 2 steps. The first step is to convert the grayscale image into binary marginalization. The second step is to vote by the edge point to get the accurate boundary contour parameter value. The edge is the boundary of the region where the gray level changes sharply in the image, and the change of the image gradation can be reflected by the gradient of the image gray distribution. Edge-based edge detection operators can therefore be used to detect edge pixels. This operator is defined as equation (4-2):
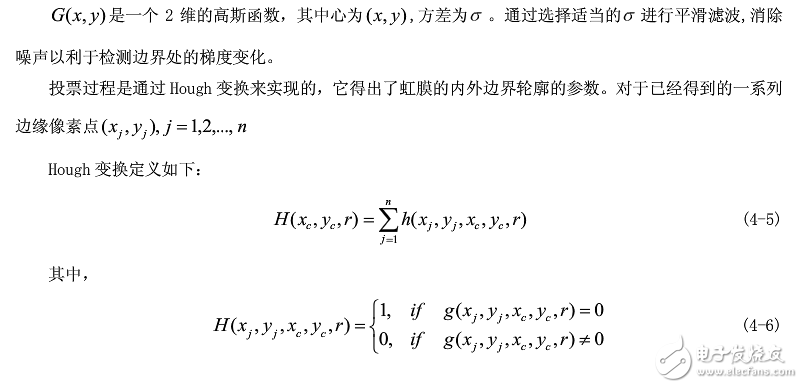

Hough transform is a method of connecting edge pixels to form a closed boundary of a region by using the global characteristics of the image. Under the condition that the shape of the region is known in advance, the boundary curve can be conveniently obtained by Hough transform, and the discontinuous edge pixels are connected. The main advantage of the Hough transform is that it is less affected by noise and curve discontinuities and can directly detect targets of certain known shapes. Since we have known in advance that the inner and outer edges of the iris are circular, the Hough transform described above can be used for detection. First, let the three parameters (Xc, Yc, r) change sequentially within a certain range. For j=1, 2,,, n, calculate g(Xi, Yi, Xc, Yc from equation (4-7). , the value of r), and then calculate the value of h(Xi, Yi, Xc, Yc, r) for each set of fixed (Xc, Yc, r), and bring this value into equation (4-5). Accumulate, get H (Xc, Yc, r), the group that reaches its maximum value is the center and radius of the desired.

In the same way, the upper and lower eyelids can be detected, except that the shape of the eyelid is curved, and the equation of the circle in the equation (4-7) can be changed to the equation of the ellipse.

The method based on zero-crossing representation was first adopted by Boles. This method uses the integral mean of the wavelet transform between the zero crossing of the wavelet transform and the two successive zero crossings to represent the iris feature. The distance between the two iris textures is calculated by two custom similarity functions to obtain the recognition result. In Boles' algorithm, the iris image is first sampled along a concentric circle centered on the center of the iris, and the two-dimensional iris image is transformed into a one-dimensional signal, which is then wavelet transformed. The wavelet function used here is the first derivative of the cubic spline function. In order to reduce the influence of noise on this representation method, only four levels of lower resolution wavelet transform results were selected to extract the iris features. Finally, the zero-crossing points of the iris one-dimensional signal wavelet transform are obtained by integrating and locating the zero-crossing intervals of the transformation result, as shown in Figure 4-5. The BoleS method is relatively simple, but the algorithm is less robust and is susceptible to image quality.

12.8V150Ah Lithium Iron Phosphate Battery
FEATURES & BENEFITS
Saintish lithium iron batteries use top quality cells, which are auto grade A LiFePO4 cells with higher energy density, more stable performance . UL approved for the cells inside the battery.
The lithium-ion batteries are perfect for solar system, caravan, RVs, campers, Yacht, off-grid applications and lead aicd replacement.
The Lithium Iron Phosphate Battery provides 3000+ cycles (@100%DoD) and 10 years lifespan. which is 10 times than lead-acid battery. 1/3 of the weight of lead acid, Saintish LiFePO4 Battery weighs only 20.8kgs each pc, but delivers twice power.
Saintish lithium iron phosphate battery has built-in BMS to protect it from overcharge, over-discharge, over current, and short circuit with excellent self-discharge rate. Operating Temperature: Charge: 0°C~45°C; Discharge: -20°C~60°C.
SPECIFICATIONS
| Rated Capacity | 150Ah | Charge Temperature | 0-45℃ |
| Nominal Voltage | 12.8V | Connection Method | Parallel & Series |
| Energy | 1920Wh | Dimensions | 483*170*240mm |
| Cycle Life | >3000@100% DOD | Weight | 20.8KG |
| Maximum Charging Current | 50A | Terminal Torque | 12-15N.m |
| Maximum Continuous Discharging Current | 100A | Enclosure Protection | IP65 |
| Discharging Voltage Range | 8.4-15.2V | Max. Batteries in Series | 4 |
| Charging Voltage Range | 14.4-15.2V | Certifications | CE, UN38.3, MSDS |
| Discharge Temperature | -20-60℃ | Warranty | 5 Years |
LiFePO4 Battery 150Ah, 150Ah Battery, Lithium Phosphate Battery, Lithium Iron Battery
Hangzhou Saintish Technology Co.,Ltd. , https://www.saintishtech.com